
„Arduino“: valdykite žingsninį variklį - kaip jis veikia
Žingsnis variklis nesisuka, kai taikoma įtampa, bet daro mažus žingsnius. Su Arduino jūs galite lengvai valdyti tokį variklį. Kaip tai padaryti, galite sužinoti šiame praktiniame patarime.
„Arduino“: valdykite žingsninį variklį - kaip jis veikia
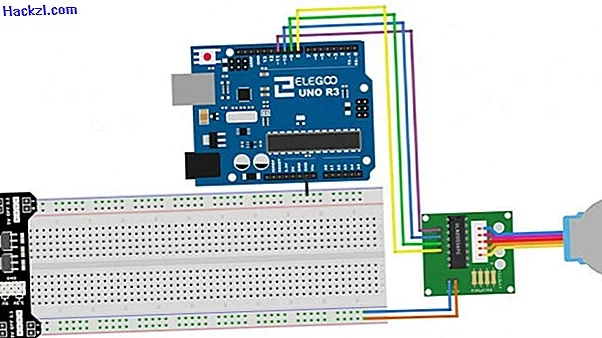
Žingsnis variklis yra elektromechaninis įtaisas, kuris elektros impulsus paverčia atskirais mechaniniais judesiais. Norėdami valdyti tokį „stepper“ variklį su „Arduino“, jums reikia „stepper“ variklio vairuotojo plokštės. Prijunkite visus komponentus, kaip parodyta paveikslėlyje.
- Tada turite importuoti reikiamą biblioteką naudodami komandą „#include“.
- Su komanda "const int stepsPerRevolution = 1500;" nustatyti, kiek žingsnių variklis turėtų atlikti per vieną apsisukimą.
- Priklausomai nuo to, kaip prijungėte stepperį, turite sukurti naują stepperio objektą. Tai galite padaryti naudodami komandą „Stepper myStepper (stepsPerRevolution, 8, 10, 9, 11);“.
- Dabar nustatymo metodu nustatykite greitį: „myStepper.setSpeed (20);“.
- Dabar galite naudoti komandą „myStepper.step (stepsPerRevolution);“ pasakyti, kad tai turėtų visiškai pasisukti pagal laikrodžio rodyklę.
Kitame straipsnyje paaiškinsime, kaip Arduino mieste nustatyti GSM modulį.